11477 Views
Movilidad
El dilema moral del coche autónomo
El coche autónomo plantea ciertos dilemas morales que los expertos IA deben considerar. Porque
A estas alturas a nadie se le escapa que los vehículos autónomos desempeñarán un papel fundamental, si no protagonista, en el futuro de la movilidad. Aunque aún son muchas las dudas y los problemas a resolver en esta materia.
Los más relevantes probablemente sean los relacionados con la seguridad vial. Antes incluso que los dilemas éticos que puede plantearse a un vehículo a la hora de tomar determinadas decisiones, es necesario que la tecnología de estas máquinas sea capaz de prevenir cualquier tipo de accidente.
¿Podrán, por ejemplo, evitar atropellar a un peatón que irrumpe repentinamente en la vía? Un grupo de investigadores australianos ha estado investigando en esta línea y ha desarrollado una tecnología que permite a este tipo de coches detectar peatones incluso cuando estos están detrás de otro vehículo o incluso de un edificio.
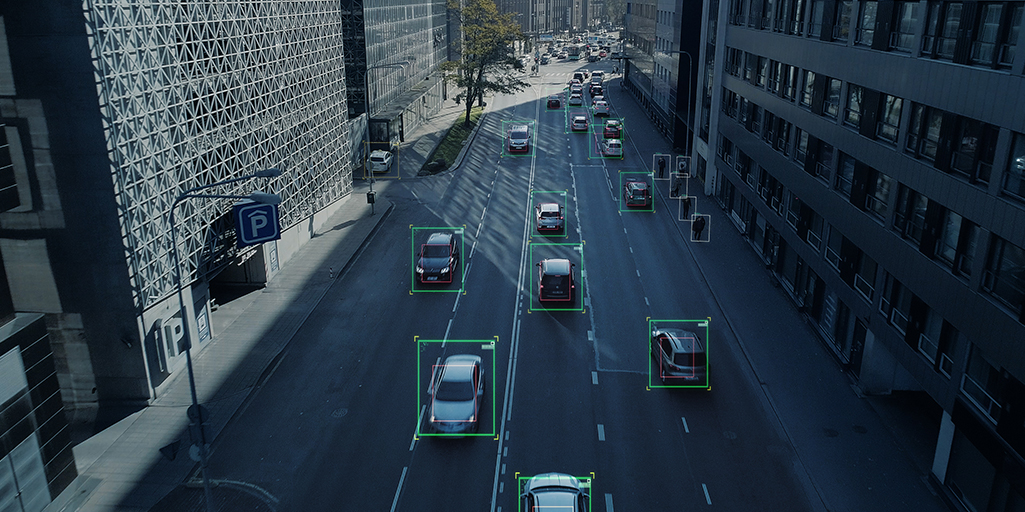
El sistema, desarrollado dentro de un programa financiado por el Centro de Investigación Cooperativa iMOVE, el Centro Australiano de Robótica de Campo de la Universidad de Sydney y la empresa de vehículos conectados Cohda Wireless, permite a los automóviles autónomos anticiparse a una situación de riesgo de atropello o de colisión con otros vehículos al ofrecer, según sus desarrolladores, «una visión de rayos X que llega incluso a los puntos ciegos».
Según Cohda, el sistema parte de una tecnología llamada percepción cooperativa o colectiva (CP). Esta se basa en el uso de unidades de intercambio de información en la carretera, que permiten a los vehículos compartir lo que pueden ver desde su posición con el resto de automóviles mediante un sistema de comunicación V2X (Vehicle-to-Everything).
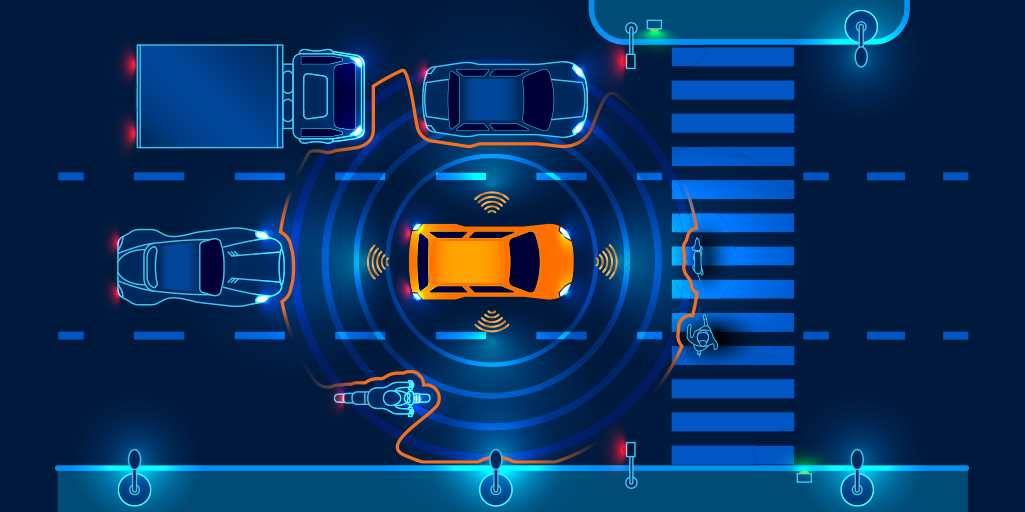
De esta forma, los vehículos pueden sumar a la suya la información en tiempo real detectada por otros que transiten por la zona, generando así una ‘radiografía’ más detallada del entorno y haciendo posible anticiparse a determinadas situaciones.
«Esto supone un cambio en las reglas de juego tanto para los vehículos autónomos como para los operados por humanos, que esperamos mejore sustancialmente la eficiencia y la seguridad del transporte por carretera», explica el profesor Eduardo Nebot, del Centro Australiano de Robótica de Campo.
Según Nebot, y tras la realización de diversos experimentos al respecto, la percepción colectiva permite que un vehículo conectado a esta red sea capaz de detectar a un peatón oculto detrás de un edificio: «Segundos antes de que los sensores de percepción locales del coche y de que el conductor pudieran ver al peatón que estaba a la vuelta de la esquina, la percepción colectiva rastreó su presencia, proporcionando tiempo adicional para que tanto conductor como columna de navegación del vehículo pudieran reaccionar ante el posible riesgo de atropello».
Los investigadores, además, aseguran que este tipo de sistema ayuda a los vehículos autónomos conectados a tomar medidas preventivas ante el comportamiento esperado de los peatones. Por ejemplo, frenar y detenerse antes de un paso de peatones cuando uno de ellos se dirige hacia él.